树莓派3B/4B安装CSI摄像头及安装驱动使用最佳实践
1.买的硬件张这个样子的(CSI接口摄像头):
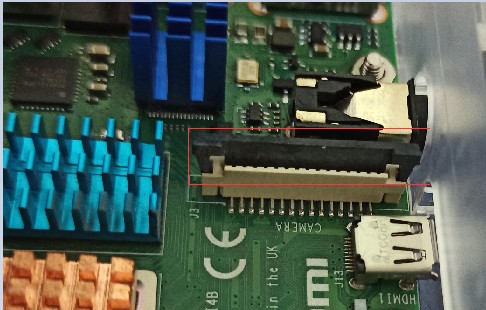
正视图(摄像头的卡扣一定不要装反了,否则树莓派会无法识别到摄像头)

后视图(蓝色所处正反面不要装反,否则也会出问题)

树莓派一端的连接如下:(这里是树莓派3B,这个位置的接口黑色卡扣是可以拉起来一点,然后把摄像头排线的一端插入,注意蓝色部分是朝向树莓派USB接口的方向)

2.检测树莓派当前的摄像头设备列表
$ ls /dev/video*
/dev/video10 /dev/video11 /dev/video12 /dev/video13 /dev/video14 /dev/video15 /dev/video16
备注:(如果安装成功显示如下.)
$ ls /dev/video*
/dev/video0 /dev/video11 /dev/video12 /dev/video13 /dev/video14 /dev/video15 /dev/video16
3.树莓派下配置文件添加模块
$ sudo vi /etc/modules
==============================(辅助线,无需理会)
# /etc/modules: kernel modules to load at boot time.
#
# This file contains the names of kernel modules that should be loaded
# at boot time, one per line. Lines beginning with "#" are ignored.
i2c-dev
bcm2835-v4l2 #这里新增一行
==============================(辅助线,无需理会)
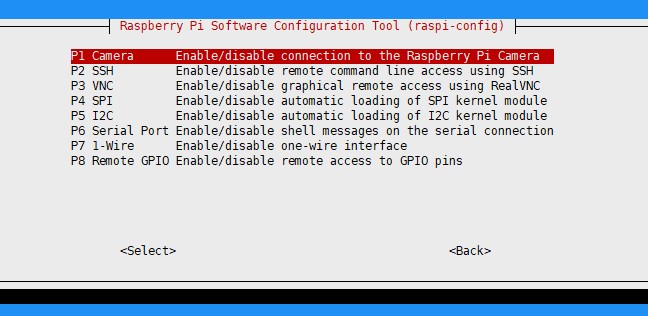
4.树莓派开启摄像头配置项
$ sudo raspi-config

继续下一步
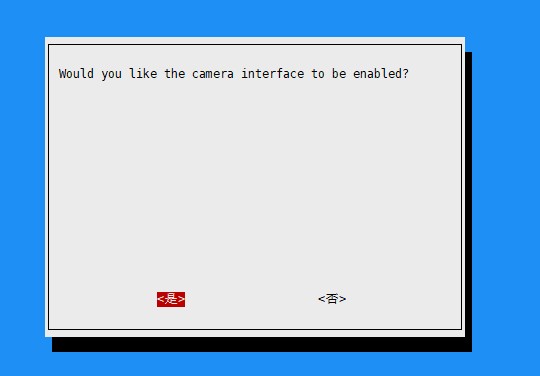
选择【是】继续
继续下一步,已经启用摄像头接口:

选择【Finish】。
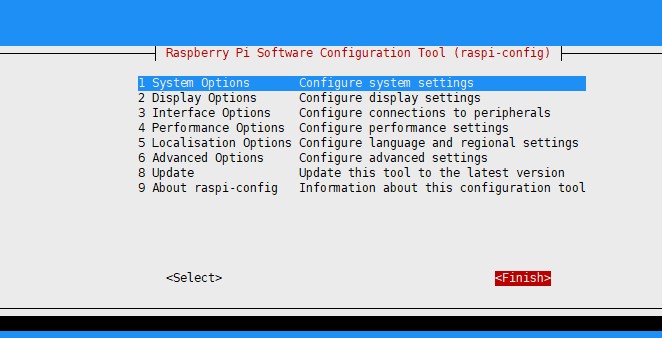
重启即可。
5.检测是否安装摄像头模块成功
$ ls /dev/video*
/dev/video0 /dev/video11 /dev/video12 /dev/video13 /dev/video14 /dev/video15 /dev/video16
如果无/dev/video0,则表示安装失败。
注意:检查摄像头的排线是否连接反了,或者是摄像头的卡扣连接反了
6.如果安装已经成功,则可以用一下命令进行测试
摄像头截图保存到image.jpg
$ raspistill -o image.jpg
如果无错误,则ok。如果出错,再次确认第5步是否完成(注意,摄像头设备一定是/dev/video0).
7.安装Python-opencv实现rtmp推流
参考《python3安装opencv》
8.编写python代码测试
raspivid + ffmpeg推流到rtmp
raspivid -o - -t 0 -vf -hf -w 640 -h 480 -fps 25 -b 500000 | ffmpeg -re -ar 44100 -ac 2 -acodec pcm_s16le -f s16le -ac 2 -i /dev/video0 -f h264 -i - -vcodec copy -acodec aac -ab 128k -g 50 -s 640x480 -strict experimental -f flv rtmp://0.0.0.0:1935/hls/live
或
import cv2
import queue
import os
import numpy as np
from threading import Thread
import datetime,_thread
import subprocess as sp
import time
# 使用线程锁,防止线程死锁
mutex = _thread.allocate_lock()
# 存图片的队列
frame_queue = queue.Queue()
# 推流的地址,前端通过这个地址拉流,主机的IP,2019是ffmpeg在nginx中设置的端口号
rtmpUrl="rtmp://192.168.40.145:2019/live/1"
# 用于推流的配置,参数比较多,可网上查询理解
command=['ffmpeg',
'-y',
'-f', 'rawvideo',
'-vcodec','rawvideo',
'-pix_fmt', 'bgr24',
'-s', "{}x{}".format(640, 480),# 图片分辨率
'-r', str(25.0),# 视频帧率
'-i', '-',
'-c:v', 'libx264',
'-pix_fmt', 'yuv420p',
'-preset', 'ultrafast',
'-f', 'flv',
rtmpUrl]
def Video():
# 调用相机拍图的函数
vid = cv2.VideoCapture(0)
if not vid.isOpened():
raise IOError("Couldn't open webcam or video")
while (vid.isOpened()):
return_value, frame = vid.read()
# 原始图片推入队列中
frame_queue.put(frame)
def push_frame():
# 推流函数
# 防止多线程时 command 未被设置
while True:
if len(command) > 0:
# 管道配置,其中用到管道
p = sp.Popen(command, stdin=sp.PIPE)
break
while True:
if frame_queue.empty() != True:
#从队列中取出图片
frame = frame_queue.get()
# process frame
# 你处理图片的代码
# 将图片从队列中取出来做处理,然后再通过管道推送到服务器上
# write to pipe
# 将处理后的图片通过管道推送到服务器上,frame是处理后的图片
p.stdin.write(frame.tostring())
def run():
#使用两个线程处理
thread1 = Thread(target=Video,)
thread1.start()
thread2 = Thread(target=push_frame,)
thread2.start()
if __name__ == '__main__':
run()
